2015ФъЙњМвЕчЭјПМЪдБИПММЦЫуЛњжЎЪ§ОнНсЙЙгыЫуЗЈ(14)
ЁЁЁЁЖдБШСНИіВЛЭЌЕФДцДЂНсЙЙЕФЩюЖШгХЯШБщРњЫуЗЈЃЌЖдгкnИіЖЅЕуeЬѕБпЕФЭМРДЫЕЃЌСкНгОиеѓгЩгкЪЧЖўЮЌЪ§зщЃЌвЊВщевФГИіЖЅЕуЕФСкНгЕуашвЊЗУЮЪОиеѓжаЕФЫљгадЊЫиЃЌвђЮЊашвЊO(n2)ЕФЪБМфЁЃЖјСкНгБэзіДцДЂНсЙЙЪБЃЌевСкНгЕуЫљашЕФЪБМфШЁОігкЖЅЕуКЭБпЕФЪ§СПЃЌЫљвдЪЧO(n+e)ЁЃЯдШЛЖдгкЕуЖрБпЩйЕФЯЁЪшЭМРДЫЕЃЌСкНгБэНсЙЙЪЙЕУЫуЗЈдкЪБМфаЇТЪЩЯДѓДѓЬсИпЁЃ
ЁЁЁЁ2.2 ЙуЖШгХЯШБщРњ
ЁЁЁЁЙуЖШгХЯШБщРњЃЌгжГЦЮЊЙуЖШгХЯШЫбЫїЃЌМђГЦBFSЁЃЭМЕФЙуЖШгХЯШБщРњОЭРрЫЦгкЪїЕФВуађБщРњСЫЁЃ
ЁЁЁЁСкНгОиеѓзіДцДЂНсЙЙЪБЃЌЙуЖШгХЯШЫбЫїЕФДњТыШчЯТЁЃ
ЁЁЁЁ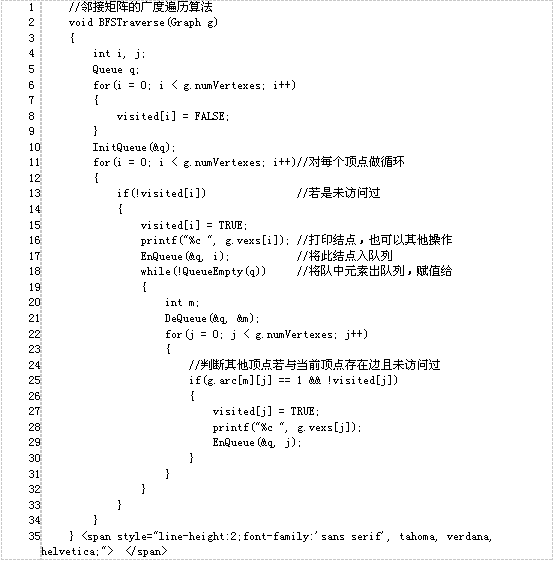
ЁЁЁЁЖдгкСкНгБэЕФЙуЖШгХЯШБщРњЃЌДњТыгыСкНгОиеѓВювьВЛДѓЃЌ ДњТыШчЯТЁЃ
ЁЁ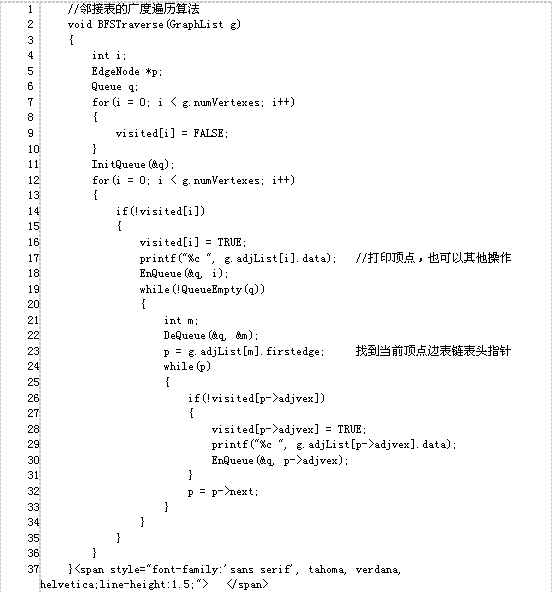
ЁЁЁЁЖдБШЭМЕФЩюЖШгХЯШБщРњгыЙуЖШгХЯШБщРњЫуЗЈЃЌЛсЗЂЯжЃЌЫќУЧдкЪБМфИДдгЖШЩЯЪЧвЛбљЕФЃЌВЛЭЌжЎДІНіНідкгкЖдЖЅЕуЕФЗУЮЪЫГађВЛЭЌЁЃПЩМћСНепдкШЋЭМБщРњЩЯЪЧУЛгагХСгжЎЗжЕФЃЌжЛЪЧВЛЭЌЕФЧщПібЁдёВЛЭЌЕФЫуЗЈЁЃ
ЁЁЁЁ7.Жб (Heap)
ЁЁЁЁдкМЦЫуЛњПЦбЇжаЃЌЖбЪЧвЛжжЬиЪтЕФЪїаЮЪ§ОнНсЙЙЃЌУПИіНсЕуЖМгавЛИіжЕЁЃЭЈГЃЮвУЧЫљЫЕЕФЖбЕФЪ§ОнНсЙЙЃЌЪЧжИЖўВцЖбЁЃЖбЕФЬиЕуЪЧИљНсЕуЕФжЕзюаЁ(ЛђзюДѓ)ЃЌЧвИљНсЕуЕФСНИізгЪївВЪЧвЛИіЖбЁЃ
ЁЁЁЁР§ГЬ
ЁЁЁЁЮЊНЋдЊЫиXВхШыЖбжаЃЌевЕНПеЯаЮЛжУЃЌНЈСЂвЛИіПебЈЃЌШєТњзуЖбађад(гЂЮФЃКheap order)ЃЌдђВхШыЭъГЩ;ЗёдђНЋИИНкЕудЊЫизАШыПебЈЃЌЩОГ§ИУИИНкЕудЊЫиЃЌЭъГЩПебЈЩЯвЦЁЃжБжСТњзуЖбађадЁЃетжжВпТдНазіЩЯТЫ(percolate up)ЁЃ
ЁЁЁЁvoid Insert( ElementType X, PriorityQueue H ){ int i; if( IsFull(H) ) { printf( "Queue is full.\n" ); return; } for( i = ++H->Size; H->Element[i/2] > X; i /= 2 ) H->Elements[i] = H->Elements[i/2]; H->Elements[i] = X;}
ЁЁЁЁвдЩЯЪЧВхШыЕНвЛИіЖўВцЖбЕФЙ§ГЬЁЃ
ЁЁЁЁDeleteMinЃЌЩОГ§зюаЁдЊЃЌМДЖўВцЪїЕФИљЛђИИНкЕуЁЃЩОГ§ИУНкЕудЊЫиКѓЃЌЖгСазюКѓвЛИідЊЫиБиаывЦЖЏЕНЖбЕУФГИіЮЛжУЃЌЪЙЕУЖбШдШЛТњзуЖбађаджЪЁЃетжжЯђЯТЬцЛЛдЊЫиЕФЙ§ГЬНазїЯТТЫЁЃ
- 2020ФъШЋЙњЪТвЕЕЅЮЛеаПМаХЯЂЛузмЃЈ4дТ27ШеЃЉ04-27
- 2020ФъЫФДЈЪЁвЫБібЇдКеаЦИИпВуДЮШЫВХ267ШЫЙЋИц04-27
- 2020ФъНЫеЪЁЫежнеХМвИлЪаЮРЩњНЁПЕЯЕЭГЪТвЕЕЅЮЛеаЦИ292ШЫМђеТ04-27
- 2020ФъеуНЪЁЩмаЫЩЯгнЧјЮРНЁЯЕЭГеаЦИИпВуДЮМАНєШБзЈвЕБЯвЕЩњ91ШЫЙЋИц04-27
- 2020ФъеуНЪЁЮТжнЦНбєЯиЪТвЕЕЅЮЛв§НјШЫВХ109ШЫЙЋИц04-27
- 2020ФъЙуЖЋЪЁЩиЙиШЪЛЏЯиЕкЖўХњЕЄЯМгЂВХєпМБашНєШБШЫВХЭјТчЪгЦЕеаЦИ117ШЫЙЋИц04-27